Research
I split my research into three buckets: deep robotic learning, interactive and active perception but these days, I focus entirely on the first one. Lately I've been particularly excited about building and using foundation models for decision making. My research has been covered by a number of news outlets including: The New York Times (front page!), The Washington Post, 60 minutes, Techcrunch, WiRED, Quanta Magazine, CNET, The Verge and others. You can find all my work on my Google Scholar:
(Deep) Robotic Learning
In my research on deep robotic learning, I focus on how we can apply modern deep learning techniques to various robotic applications.
|
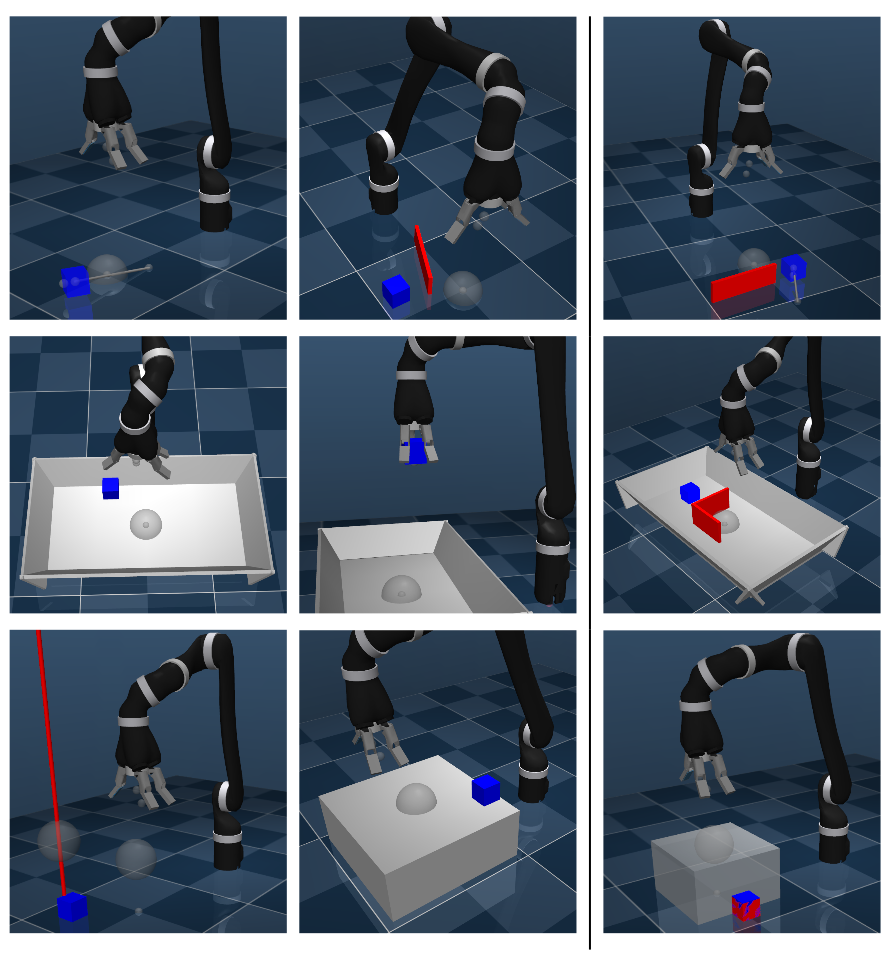
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
under submission, 2023
A. Padalkar, A. Pooley, A. Jain, A. Bewley, A. Herzog, A. Irpan, A. Khazatsky, A. Rai, A. Singh, A. Brohan, A. Raffin, A. Wahid, B. Burgess-Limerick, B. Kim, B. Schölkopf, B. Ichter, C. Lu, C. Xu, C. Finn, C. Xu, C. Chi, C. Huang, C. Chan, C. Pan, C. Fu, C. Devin, D. Driess, D. Pathak, D. Shah, D. Büchler, D. Kalashnikov, D. Sadigh, E. Johns, F. Ceola, F. Xia, F. Stulp, G. Zhou, G. S. Sukhatme, G. Salhotra, G. Yan, G. Schiavi, G. Kahn, H. Su, H. Fang, H. Shi, H. Ben Amor, H. I Christensen, H. Furuta, H. Walke, H. Fang, I. Mordatch, I. Radosavovic, I. Leal, J. Liang, J. Abou-Chakra, J. Kim, J. Peters, J. Schneider, J. Hsu, J. Bohg, J. Bingham, J. Wu, J. Wu, J. Luo, J. Gu, J. Tan, J. Oh, J. Malik, J. Tompson, J. Yang, J. J. Lim, J. Silvério, J. Han, K. Rao, K. Pertsch, K. Hausman, K. Go, K. Gopalakrishnan, K. Goldberg, K. Byrne, K. Oslund, K. Kawaharazuka, K. Zhang, K. Rana, K. Srinivasan, L. Y. Chen, L. Pinto, L. Tan, L. Ott, L. Lee, M. Tomizuka, M. Du, M. Ahn, M. Zhang, M. Ding, M. K. Srirama, M. Sharma, M. J. Kim, N. Kanazawa, N. Hansen, N. Heess, N. J. Joshi, N. Suenderhauf, N. Di Palo, N. M. M. Shafiullah, O. Mees, O. Kroemer, P. R. Sanketi, P. Wohlhart, P. Xu, P. Sermanet, P. Sundaresan, Q. Vuong, R. Rafailov, R. Tian, R. Doshi, R. Martín-Martín, R. Mendonca, R. Shah, R. Hoque, R. Julian, S. Bustamante, S. Kirmani, S. Levine, S. Moore, S. Bahl, S. Dass, S. Sonawani, S. Song, S. Xu, S. Haldar, S. Adebola, S. Guist, S. Nasiriany, S. Schaal, S. Welker, S. Tian, S. Dasari, S. Belkhale, T. Osa, T. Harada, T. Matsushima, T. Xiao, T. Yu, T. Ding, T. Davchev, T. Z. Zhao, T. Armstrong, T. Darrell, V. Jain, V. Vanhoucke, W. Zhan, W. Zhou, W. Burgard, X. Chen, X. Wang, X. Zhu, X. Li, Y. Lu, Y. Chebotar, Y. Zhou, Y. Zhu, Y. Xu, Y. Wang, Y. Bisk, Y. Cho, Y. Lee, Y. Cui, Y. Wu, Y. Tang, Y. Zhu, Y. Li, Y. Iwasawa, Y. Matsuo, Z. Xu, Z. J. Cui.
|
|
What Makes Pre-Trained Visual Representations Successful for Robust Manipulation?
under submission, 2023
K. Burns, Z. Witzel, J. Ibn Hamid, T. Yu, C. Finn, K. Hausman
|

|
RoboVQA: Multimodal Long-Horizon Reasoning
for Robotics
under submission, 2023
P. Sermanet, T. Ding, J. Zhao, F. Xia, D. Dwibedi, K. Gopalakrishnan, C. Chan, G. Dulac-Arnold, S. Maddineni, N. J. Joshi, P. Florence, W. Han, R. Baruch, Y. Lu, S. Mirchandani, P. Xu, P. Sanketi, K. Hausman, I. Shafran, B. Ichter, Y. Cao
|
|
RT-Trajectory: Robotic Task Generalization via Hindsight Trajectory Sketches
under submission, 2023
J. Gu, S. Kirmani, P. Wohlhart, Y. Lu, M. Gonzalez Arenas, K. Rao, W. Yu, C. Fu, K. Gopalakrishnan, Z. Xu, P. Sundaresan, P. Xu, H. Su, K. Hausman, C. Finn, Q. Vuong, T. Xiao
|
|
RT-Sketch: Goal-Conditioned Imitation
Learning from Hand-Drawn Sketches
under submission, 2023
P. Sundaresan, Q. Vuong, J. Gu, P. Xu, T. Xiao, S. Kirmani, T. Yu, M. Stark, A. Jain, K. Hausman, D. Sadigh, J. Bohg, S. Schaal
|
|
Q-Transformer: Scalable Offline Reinforcement Learning via Autoregressive Q-Functions
Conference on Robot Learning (CoRL), 2023
Y. Chebotar, Q. Vuong, A. Irpan, K. Hausman, F. Xia, Y. Lu, A. Kumar, T. Yu, A. Herzog, K. Pertsch, K. Gopalakrishnan, J. Ibarz, O. Nachum, S. Sontakke, G. Salazar, H. T. Tran, J. Peralta, C. Tan, D. Manjunath, J. Singht, B. Zitkovich, T. Jackson, K. Rao, C. Finn, S. Levine
|
|
RT-2: Vision-Language-Action Models
Transfer Web Knowledge to Robotic Control
Conference on Robot Learning (CoRL), 2023
A. Brohan, N. Brown, J. Carbajal, Y. Chebotar, X. Chen, K. Choromanski, T. Ding, D. Driess, A. Dubey, C. Finn, P. Florence, C. Fu, M. Gonzalez Arenas, K. Gopalakrishnan, K. Han, K. Hausman, A. Herzog, J. Hsu, B. Ichter, A. Irpan, N. Joshi, R. Julian, D. Kalashnikov, Y. Kuang, I. Leal, L. Lee, T. E. Lee, S. Levine, Y. Lu, H. Michalewski, I. Mordatch, K. Pertsch, K. Rao, K. Reymann, M. Ryoo, G. Salazar, P. Sanketi, P. Sermanet, J. Singh, A. Singh, R. Soricut, H. Tran, V. Vanhoucke, Q. Vuong, A. Wahid, S. Welker, P. Wohlhart, J. Wu, F. Xia, T. Xiao, P. Xu, S. Xu, T. Yu, B. Zitkovich
|
|
Open-World Object Manipulation using Pre-Trained Vision-Language Models
Conference on Robot Learning (CoRL), 2023
A. Stone*, T. Xiao*, Y. Lu*, K. Gopalakrishnan, K. Lee, Q. Vuong, P. Wohlhart, B. Zitkovich, F. Xia, C. Finn, K. Hausman
|
|
Grounded Decoding:
Guiding Text Generation with Grounded Models for Robot Control
Neural Information Processing Systems (NeurIPS), 2023
W. Huang, F. Xia, D. Shah, A. Zeng, Y. Lu, P. Florence, I. Mordatch, S. Levine, K. Hausman, B. Ichter
|
|
PaLM-E: An Embodied Multimodal Language Model
International Conference on Machine Learning (ICML), 2023
D. Driess, F. Xia, M. Sajjadi, C. Lynch, A. Chowdhery, B. Ichter, A. Wahid, J. Tompson, Q. Vuong, T. Yu, W. Huang, Y. Chebotar, P. Sermanet, D. Duckworth, S. Levine, V. Vanhoucke, K. Hausman, M. Toussaint, K. Greff, A. Zeng, I. Mordatch, P. Florence
|

|
Deep RL at Scale:
Sorting Waste in Office Buildings with a Fleet of Mobile Manipulators
Robotics: Science and Systems (RSS), 2023
A. Herzog*, K. Rao*, K. Hausman*, Y. Lu*, P. Wohlhart*, M. Yan, J. Lin, M. Gonzalez Arenas, T. Xiao, D. Kappler, D. Ho, J. Rettinghouse, Y. Chebotar, K. Lee, K. Gopalakrishnan, R. Julian, A. Li, C. Fu, B. Wei, S. Ramesh, K. Holden, K. Kleiven, D. Rendleman, S. Kirmani, J. Bingham, J. Weisz, Y. Xu, W. Lu, M. Bennice, C. Fong, D. Do, J. Lam, Y. Bai, B. Holson, M. Quinlan, N. Brown, M. Kalakrishnan, J. Ibarz, P. Pastor, S. Levine
|
|
Scaling Robot Learning with Semantically Imagined Experience
Robotics: Science and Systems (RSS), 2023
T. Yu, T. Xiao, A. Stone, J. Tompson, A. Brohan, S. Wang, J. Singh, C. Tan, Dee M, J. Peralta, B. Ichter, K. Hausman, F. Xia
|

|
Robotic Skill Acquisition via Instruction Augmentation with Vision-Language Models
Robotics: Science and Systems (RSS), 2023
T. Xiao*, H. Chan*, P. Sermanet, A. Wahid, A. Brohan, K. Hausman, S. Levine, J. Tompson
|

|
RT-1: Robotics Transformer
for Real-World Control at Scale
Robotics: Science and Systems (RSS), 2023
A. Brohan, N. Brown, J. Carbajal, Y. Chebotar, J. Dabis, C. Finn, K. Gopalakrishnan,
K. Hausman, A. Herzog, J. Hsu, J. Ibarz, B. Ichter, A. Irpan, T. Jackson, S. Jesmonth, N. Joshi, R. Julian, D. Kalashnikov, Y. Kuang, I. Leal, K. Lee, S. Levine, Y. Lu, U. Malla, D. Manjunath, I. Mordatch, O. Nachum, C. Parada, J. Peralta, E. Perez, K. Pertsch, J. Quiambao, K. Rao, M. Ryoo, G. Salazar, P. Sanketi, K. Sayed, J. Singh, S. Sontakke, A. Stone, C. Tan, H. Tran, V. Vanhoucke, S. Vega, Q. Vuong, F. Xia, T. Xiao, P. Xu, S. Xu, T. Yu, B. Zitkovich
|
|
Code as Policies: Language Model Programs for Embodied Control
International Conference on Robotics and Automation (ICRA), 2023
Best Learning Paper
J. Liang, W. Huang, F. Xia, P. Xu, K. Hausman, B. Ichter, P. Florence, A. Zeng
|

|
Inner Monologue: Embodied Reasoning through Planning
with Language Models
Conference on Robot Learning (CoRL), 2022
W. Huang*, F. Xia*, T. Xiao*, H. Chan, J. Liang, P. Florence, A. Zeng, J. Tompson, I. Mordatch, Y. Chebotar, P. Sermanet, N. Brown, T. Jackson, L. Luu, S. Levine, K. Hausman, B. Ichter
|
|
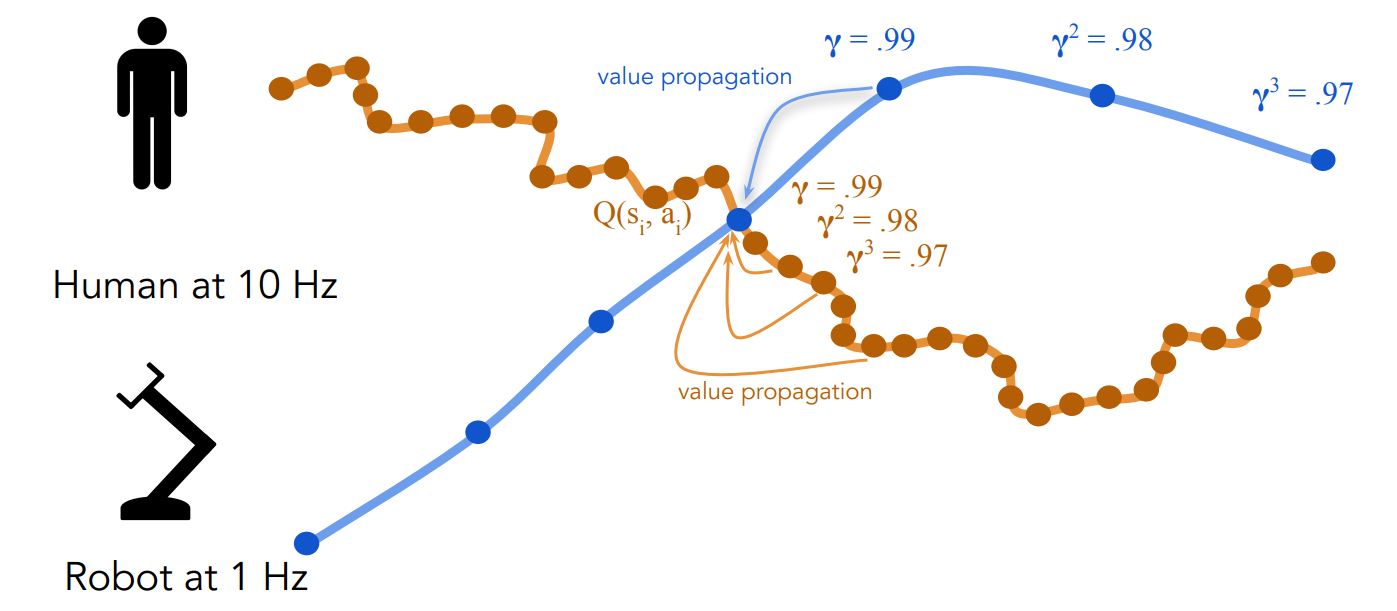
Offline Reinforcement Learning at Multiple Frequencies
Conference on Robot Learning (CoRL), 2022
K. Burns, T. Yu, C. Finn, K. Hausman
|
|
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Conference on Robot Learning (CoRL), 2022
Special Innovation Award
Michael Ahn*, Anthony Brohan*, Noah Brown*, Yevgen Chebotar*, Omar Cortes*, Byron David*, Chelsea Finn*, Keerthana Gopalakrishnan*, Karol Hausman*, Alex Herzog*, Daniel Ho*, Jasmine Hsu*, Julian Ibarz*, Brian Ichter*, Alex Irpan*, Eric Jang*, Rosario Jauregui Ruano*, Kyle Jeffrey*, Sally Jesmonth*, Nikhil J Joshi*, Ryan Julian*, Dmitry Kalashnikov*, Yuheng Kuang*, Kuang-Huei Lee*, Sergey Levine*, Yao Lu*, Linda Luu*, Carolina Parada*, Peter Pastor*, Jornell Quiambao*, Kanishka Rao*, Jarek Rettinghouse*, Diego Reyes*, Pierre Sermanet*, Nicolas Sievers*, Clayton Tan*, Alexander Toshev*, Vincent Vanhoucke*, Fei Xia*, Ted Xiao*, Peng Xu*, Sichun Xu*, Mengyuan Yan*
|

|
Jump-Start Reinforcement Learning
International Conference on Machine Learning (ICML), 2023
I. Uchendu, T. Xiao, Y. Lu, B. Zhu, M. Yan, J. Simon, M. Bennice, C. Fu, C. Ma, J. Jiao, S. Levine, K. Hausman
|

|
Demonstration-Bootstrapped Autonomous Practicing via Multi-Task Reinforcement Learning
International Conference on Robotics and Automation (ICRA), 2023
A. Gupta, C. Lynch, B. Kinman, G. Peake, S. Levine, K. Hausman
|
|
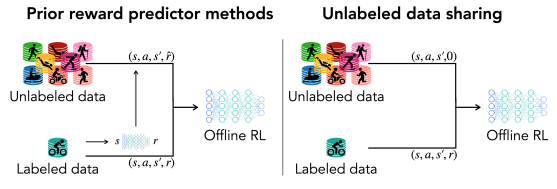
How to Leverage Unlabeled Data in Offline Reinforcement Learning
International Conference on Machine Learning (ICML), 2022
T. Yu*, A. Kumar*, Y. Chebotar, K. Hausman, C. Finn, S. Levine
|
|
Autonomous Reinforcement Learning: Formalism and Benchmarking
International Conference on Learning Representations (ICLR), 2022
A. Sharma*, K. Xu*, N. Sardana, A. Gupta, K. Hausman, S. Levine, C. Finn
|
|
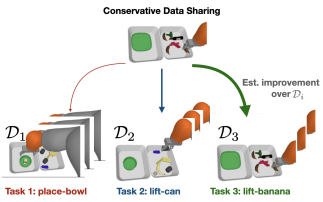
Conservative Data Sharing for Multi-Task Offline Reinforcement Learning
Neural Information Processing Systems (NeurIPS), 2021
T. Yu*, A. Kumar*, Y. Chebotar, K. Hausman, S. Levine, C. Finn
|
|
Persistent Reinforcement Learning via Subgoal Curricula
Neural Information Processing Systems (NeurIPS), 2021
A. Sharma, A. Gupta, S. Levine, K. Hausman, C. Finn
|
|
MT-Opt: Continuous Multi-Task Robotic Reinforcement Learning at Scale
Conference on Robot Learning (CoRL), 2021
D. Kalashnikov*, J. Varley*, Y. Chebotar, B. Swanson, R. Jonschkowski, C. Finn, S. Levine, K. Hausman*
|
|
AW-Opt: Learning Robotic Skills with
Imitation and Reinforcement Learning at Scale
Conference on Robot Learning (CoRL), 2021
Yao Lu, Karol Hausman, Yevgen Chebotar, Mengyuan Yan, Eric Jang, Alexander Herzog,
Ted Xiao, Alex Irpan, Mohi Khansari, Dmitry Kalashnikov, Sergey Levine
|
|
Actionable Models: Unsupervised Offline Reinforcement Learning of Robotic Skills
International Conference on Machine Learning (ICML), 2021
Y.Chebotar, K. Hausman, Y. Lu, T. Xiao, D. Kalashnikov, J. Varley, A. Irpan, B. Eysenbach, R. Julian, C. Finn, S. Levine
|
|
A Geometric Perspective on Self-Supervised Policy Adaptation
International Conference on Robotics and Automation (ICRA), 2020
C. Bodnar, K. Hausman, G. Dulac-Arnold, R. Jonschkowski
|
|
Never Stop Learning: The Effectiveness of Fine-Tuning in Robotic Reinforcement Learning
Conference on Robot Learning (CoRL), 2020
R. Julian, B. Swanson, G. Sukhatme, S. Levine, C. Finn, K. Hausman
|
|
Modeling Long-horizon Tasks as Sequential Interaction Landscapes
Conference on Robot Learning (CoRL), 2020
S. Pirk, K. Hausman, A. Toshev, M. Khansari
|
|
Gradient Surgery for Multi-Task Learning
Neural Information Processing Systems (NeurIPS), 2020
T. Yu, S. Kumar, A. Gupta, S. Levine, K. Hausman, C. Finn
|
|
Quantile QT-Opt for Risk-Aware
Vision-Based Robotic Grasping
Robotics: Science and Systems (RSS), 2020
Best Systems Paper Finalist
C. Bodnar, A. Li, K. Hausman, P. Pastor, M. Kalakrishnan
|

|
Emergent Real-World Robotic Skills via Unsupervised Off-Policy Reinforcement Learning
Robotics: Science and Systems (RSS), 2020
A. Sharma, M. Ahn, S. Levine, V. Kumar, K. Hausman*, S. Gu*
|
|
Thinking While Moving: Deep Reinforcement Learning with Concurrent Control
International Conference on Learning Representations (ICLR), 2020
T. Xiao, E. Jang, D. Kalashnikov, S. Levine, J. Ibarz, K. Hausman*, A. Herzog*
|
|
Dynamics-Aware Unsupervised Discovery of Skills
International Conference on Learning Representations (ICLR), 2020
oral presentation
A. Sharma, S. Gu, S. Levine, V. Kumar, K. Hausman
|
|
Learning to Interactively
Learn and Assist
AAAI 2020,
oral presentation
M. Woodward, C. Finn, K. Hausman
|
|
Relay Policy Learning: Solving Long-Horizon Tasks via Imitation and Reinforcement Learning
Conference on Robot Learning (CoRL), 2019
A. Gupta, V. Kumar, C. Lynch, S. Levine, K. Hausman
|
|
Meta-World: A Benchmark and Evaluation for Multi-Task and Meta Reinforcement Learning
Conference on Robot Learning (CoRL), 2019
T. Yu, D. Quillen, Z. He, R. Julian, K. Hausman, C. Finn, S. Levine
|

|
Scaling Simulation-to-real Transfer by Learning Composable Robot Skills.
International Symposium on Experimental Robotics (ISER), 2018
International Journal of Robotics Research (IJRR), 2019
R. Julian*, E. Heiden*, Z. He, H. Zhang,
S. Schaal, J. Lim, G. Sukhatme, K. Hausman
|
|
Learning an Embedding Space for Transferable Robot Skills
International Conference on Learning Representations (ICLR), 2018
K. Hausman, J.T. Springenberg, Z. Wang, N. Heess, M. Riedmiller
|
|
Multi-Modal Imitation Learning from Unstructured Demonstrations using GANs
Neural Information Processing Systems (NIPS), 2017
K. Hausman*, Y. Chebotar*, S. Schaal, G. Sukhatme, J. Lim
|
|
Combining Model-Based and Model-Free Updates for Trajectory-Centric Reinforcement Learning
International Conference on Machine Learning (ICML), 2017
Y. Chebotar*, K. Hausman*, M. Zhang*, G. Sukhatme, S. Schaal, S. Levine
|

|
Generalizing Regrasping with Supervised Policy Learning
International Symposium on Experimental Robotics (ISER), 2016
Y. Chebotar*, K. Hausman*, O. Kroemer, G. Sukhatme, S. Schaal
|
|
Self-Supervised Regrasping using Spatio-Temporal Tactile Features and Reinforcement Learning
International Conference on Intelligent Robots and Systems (IROS), 2016
Y. Chebotar, K. Hausman, Z. Su, G. Sukhatme, S. Schaal
|
|
|
Workshop Publications
Training an Interactive Helper
NIPS Workshop on Emergent Communication and NIPS Workshop Learning by Instruction, 2018
M. Woodward, C. Finn, K. Hausman
pdf
Learning a System-ID Embedding Space for Domain Specialization
with Deep Reinforcement Learning
NIPS Workshop on Reinforcement Learning under Partial Observability, 2018
J. Preiss, K. Hausman, G. Sukhatme
pdf
Simulator Predictive Control: Using Learned Task Representations and MPC for Zero-Shot Generalization and Sequencing
NIPS Deep Reinforcement Learning Workshop, 2018
Z. He, R. Julian, E. Heiden, H. Zhang, S. Schaal, J. Lim, G. Sukhatme, K. Hausman
pdf
Learning Skill Embeddings for Transferable Robot Skills
NIPS Deep Reinforcement Learning Symposium, 2017
K. Hausman, J.T. Springenberg, Z. Wang, N. Heess, M. Riedmiller
pdf
Learning Robot Skill Embeddings
NIPS Workshop on Acting and Interacting in the Real World: Challenges in Robot Learning, 2017
K. Hausman, J.T. Springenberg, Z. Wang, N. Heess, M. Riedmiller
pdf
IntentionGAN: Multi-Task Imitation Learning from Unstructured Demonstrations
Conference on Robot Learning (CoRL), 2017
K. Hausman*, Y. Chebotar*, S. Schaal, G. Sukhatme, J. Lim
bibtex
pdf
IntentionGAN: Multi-Modal Imitation Learning from Unstructured Demonstrations
RSS Workshop on Learning from Demonstration in High-Dimensional Feature Spaces, 2017
K. Hausman*, Y. Chebotar*, S. Schaal, G. Sukhatme, J. Lim
bibtex
pdf
Combining Model-Based and Model-Free Updates for Deep Reinforcement Learning
RSS Workshop on New Frontiers for Deep Learning in Robotics, 2017
Best Paper Award
Y. Chebotar*, K. Hausman*, M. Zhang*, G. Sukhatme, S. Schaal, S. Levine
bibtex
pdf
Regrasping using Tactile Perception and Supervised Policy Learning
AAAI Symposium on Interactive Multi-Sensory Object Perception for Embodied Agents, 2017
Y. Chebotar, K. Hausman, Z. Su, G. Sukhatme, S. Schaal
bibtex
pdf
Supervised Policy Fusion with Application to Regrasping
IROS Workshop on Closed-loop Grasping and Manipulation: Challenges and Progress, 2016
Y. Chebotar*, K. Hausman*, O. Kroemer, G. Sukhatme, S. Schaal
bibtex
pdf
|
Interactive Perception
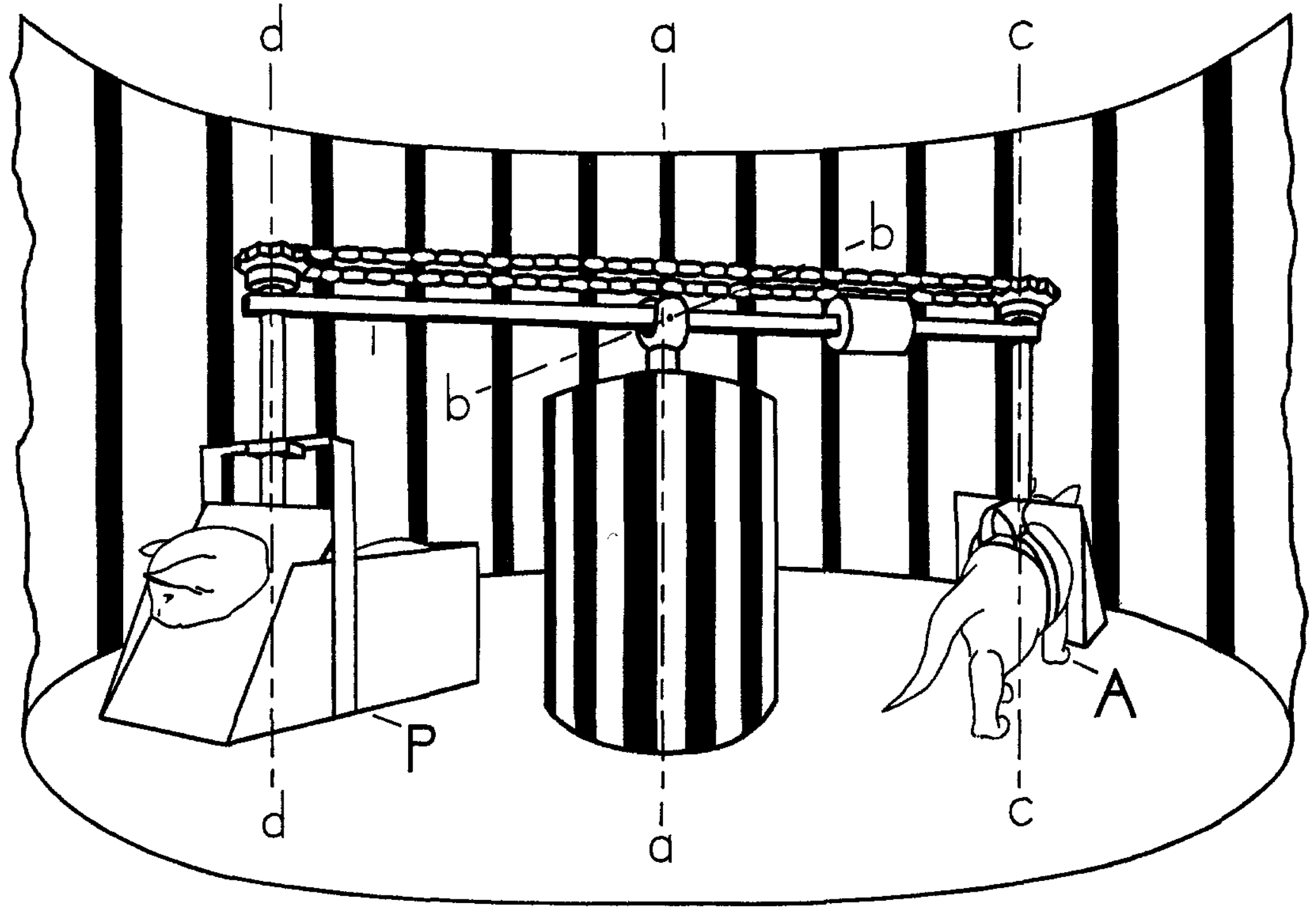
In interactive perception (IP) any kind of forceful interactions with the environment are used to simplify and enhance perception, in turn enabling robust perceptually-guided manipulation. IP has two main benefits: i) physical interaction creates a novel sensory signal that would otherwise not be present, and ii) by exploiting knowledge of the regularity in the combined space of sensory data and action parameters, the prediction and interpretation of this novel signal becomes simpler and more robust. For more details, see our survey paper.
|
Interactive Perception: Leveraging Action in Perception and Perception in Action
IEEE Transactions on Robotics (T-RO), 2016
J. Bohg*, K. Hausman*, B. Sankaran*, O. Brock, D. Kragic, S. Schaal, G. Sukhatme
|

|
Active Articulation Model Estimation through Interactive Perception
International Conference on Robotics and Automation (ICRA), 2015
K. Hausman, S. Niekum, S. Osentoski , G. Sukhatme
|
|
Force Estimation and Slip Detection for Grip Control using a Biomimetic Tactile Sensor
International Conference on Humanoid Robotics (Humanoids), 2015
Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. Loeb, G. Sukhatme, S. Schaal
|

|
Interactive Segmentation of Textured and Textureless Objects
Chapter in Handling Uncertainty and Networked Structure in Robot Control, L. Busoniu and L. Tamas (eds.), Springer, 2015
K. Hausman, D. Pangercic, Z. Marton, F. Belent-Benczedi, C. Bersch, M. Gupta, G. Sukhatme, M. Beetz
|
|
Tracking-based Interactive Segmentation of Textureless Objects
International Conference on Robotics and Automation (ICRA), 2013
Best Service Robotics Paper Finalist
K. Hausman, F. Balint-Benczedi, D. Pangercic, Z. Marton,
R. Ueda, K. Okada, M. Beetz
|
|
|
Workshop Publications
BiGS: BioTac Grasp Stability Dataset
ICRA Workshop on Grasping and Manipulation Datasets, 2016
Y. Chebotar, K. Hausman, Z. Su, A. Molchanov, O. Kroemer, G. Sukhatme, S. Schaal
website
bibtex
pdf
Slip Classification Using Tangential and Torsional Skin Distortions
on a Biomimetic Tactile Sensor
BMVA Workshop on Visual, Tactile and Force Sensing for Robot Manipulation, 2015
Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. Loeb, G. Sukhatme, S. Schaal
bibtex
pdf
Slip Detection and Classification for Grip Control using Multiple Sensory Modalities
on a Biomimetic Tactile Sensor
IROS Workshop on Multimodal Sensor-Based Robot Control for HRI and Soft Manipulation, 2015
Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. Loeb, G. Sukhatme, S. Schaal
bibtex
pdf
Towards Interactive Object Recognition
IROS 3rd Workshop on Robots in Clutter: Perception and Interaction in Clutter, 2014
K. Hausman, C. Corcos, J. Mueller, F. Sha, G. Sukhatme
bibtex
pdf
Segmentation of Cluttered Scenes through Interactive Perception
ICRA Workshop on Semantic Perception and Mapping for Knowledge-enabled Service Robotics, 2012
K. Hausman, C. Bersch, D. Pangercic, S. Osentoski, Z. Marton, M. Beetz
bibtex
pdf
Segmentation of Textured and Textureless Objects through Interactive Perception
RSS Workshop on Robots in Clutter: Manipulation, Perception and Navigation in Human Environments, 2012
C. Bersch, D. Pangercic, S. Osentoski, K. Hausman, Z. Marton, R. Ueda, K. Okada, M. Beetz
bibtex
pdf
|
Active Perception
Active perception pioneered the insight that perception is active and exploratory. In my research, I try to show that, state estimation (perception) can be significantly improved when considered jointly with control (action). I demonstrate these research insights on various flying vehicles such as quadrotors.
|
Simultaneous Self-Calibration and Navigation using Trajectory Optimization
International Journal of Robotics Research (IJRR), 2018
J. Preiss, K. Hausman, G. Sukhatme, S. Weiss
|
|
Confidence-rich Grid Mapping
International Symposium on Robotics Research (ISRR), 2017
International Journal of Robotics Research (IJRR), 2019
A. Agha-mohammadi, E. Heiden, K. Hausman, G. Sukhatme
|
|
Trajectory Optimization for Self-Calibration and Navigation
Robotics: Science and Systems (RSS), 2017
J. Preiss, K. Hausman, G. Sukhatme, S. Weiss
|
|
Planning High-speed Safe Trajectories in Confidence-rich Map
International Conference on Intelligent Robots and Systems (IROS), 2017
E. Heiden, K. Hausman, G. Sukhatme, A. Agha-mohammadi
|
|
Occlusion-Aware Multi-Robot 3D Tracking
International Conference on Intelligent Robots and Systems (IROS), 2016
K. Hausman, G. Kahn, S. Patil, J. Mueller, K. Goldberg, P. Abbeel, G. Sukhatme
|
|
Cooperative Multi-Robot Control for Target Tracking with Onboard Sensing
International Journal of Robotics Research (IJRR), 2015
K. Hausman, J. Mueller, A. Hariharan, N. Ayanian, G. Sukhatme
|

|
Self-Calibrating Multi-Sensor Fusion with Probabilistic Measurement Validation for Seamless Sensor Switching on a UAV
International Conference on Robotics and Automation (ICRA), 2016
K. Hausman, S. Weiss, R. Brockers, L. Matthies, G. Sukhatme
|

|
Cooperative Control for Target Tracking with Onboard Sensing
International Symposium on Experimental Robotics (ISER), 2014
K. Hausman, J. Mueller, A. Hariharan, N.Ayanian, G. Sukhatme
|
|
|
Workshop Publications
Confidence-aware Occupancy Grids
IROS Workshop on Vision-based Agile Autonomous Navigation of UAVs, 2017
A. Agha-mohammadi, E. Heiden, K. Hausman, G. Sukhatme
bibtex
pdf
High-speed Safe Trajectory Planning in Confidence-rich Maps
IROS Workshop on Vision-based Agile Autonomous Navigation of UAVs, 2017
E. Heiden, K. Hausman, G. Sukhatme, A. Agha-mohammadi
bibtex
pdf
Observability-Aware Trajectory Optimization for Self-Calibration with Application to UAVs
RSS Workshop on Robot-Environment Interaction for Perception and Manipulation, 2016
K. Hausman, J. Preiss, G. Sukhatme, S. Weiss
bibtex
pdf
Optimization-based Cooperative Multi-Robot Target Tracking
with Reasoning about Occlusions
IROS Workshop on On-line Decision-Making in Multi-Robot Coordination, 2015
K. Hausman, G. Kahn, S. Patil, J. Mueller, K. Goldberg, P. Abbeel, G. Sukhatme
bibtex
pdf
Cooperative Multi-Robot Control for Target Tracking
with Efficient Switching of Onboard Sensing Topologies
IROS Workshop on Taxonomies of Interconnected Systems:
Topology in Distributed Robotics, 2014
K. Hausman, J. Mueller, A. Hariharan, N. Ayanian, G. Sukhatme
bibtex
pdf
|